
情報処理学会第81回全国大会中高生ポスターセッション発表
ライントレースの機械学習を自動運転バスに応用
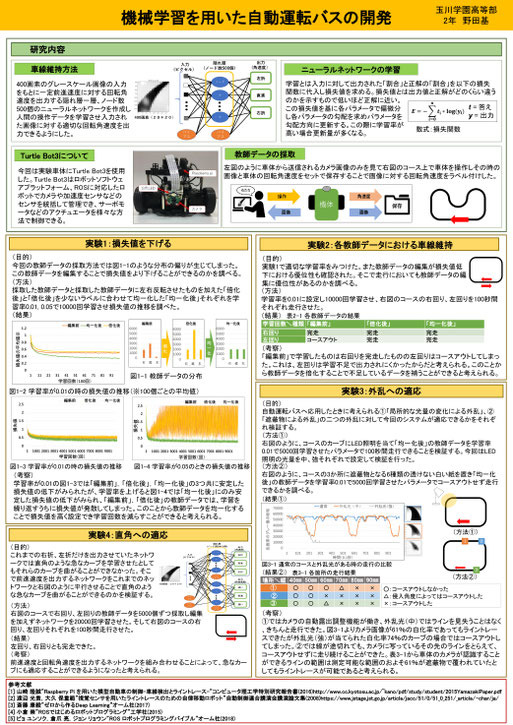
玉川学園高等部 野田基くん(2年)

ニューラルネットワークを用いた車線維持システムの開発
あらかじめ道路にラインを引いておくことで、バスの自動運転化が簡単に実現できるのではないかと考え、カメラを用いたライントレースについて研究を行いました。
人間は、目で見た映像から右折か左折かを判断しています。これと同じ仕組みのAIの手法を利用することで、今後自動運転への応用ができると期待して、ニューラルネットワークを用いた方法に挑戦しました。
その結果、カメラ画像の入力をもとに、ニューラルネットワークが右折・左折・前進の判断を行い、ラインをたどることに成功しました。また、この方法では、線の一部が途切れていたり、明るさが違っていたりしても、ライントレースできる利点があることが確認できました。
※クリックすると拡大します
■研究を始めた理由や経緯は?
中学生の時、PID制御などのフィードバック制御の機能性に感動し、それらを用いたロボットを制作し大会に参加していました。高校になってから、DeepMind社によるAlphaGoのニュースを聞いてフィードバック制御の様な「関数」が、囲碁のチャンピオンを打ち負かすような働きをすることに驚かされました。そのこともあり、ニューラルネットワークに関係した研究をしています。
※1 Proportional-Integral-Differential Controller:制御工学におけるフィードバック制御の一種。入力値の制御を出力値と目標値との偏差、その積分、および微分の3つの要素によって行う方法のこと。[Wikipediaより]
■かかった時間はどのくらい?
1年です。
■今回の研究で苦労したことは?
ニューラルネットワークで手書きの数字を認識する研究を行うなど、参考資料に沿って基本的なことから研究する必要があったので、とても時間がかかり大変でした。また、研究の環境を構築することにも苦労しました。
■「ココは工夫した!」「ココを見てほしい」という点は?
手書きの数字の認識の研究をしていた時は、インポートファイルを使って研究していました。しかし、今回のライントレースのための画像処理では、ニューラルネットワークの仕組みがずいぶん理解できるようになったので、インポートファイルを使わず、一から自作することに成功したことが一番の工夫点です。
■今回のポスター発表の感想をどうぞ!
自分が行ってきた研究について、興味を持って聞いてもらえることがうれしかったです。他の発表会でも発表したことがありましたが、今回参加している人たちは専門家も多く、いろいろな質問をしていただけて楽しかった。また、アドバイスもいただけて、とても有意義な発表会でした。
※この研究は、中高生ポスターセッションの奨励賞を受賞しました