
情報処理学会第81回全国大会中高生ポスターセッション発表
カイコのうねうねした動きをロボットで再現!
徳島県立脇町高校
近藤理生くん(1年)、東和輝くん(1年)、小松拓豊くん(1年)、武田拓馬くん(1年)

カイコの歩容解析とソフトロボットによる再現
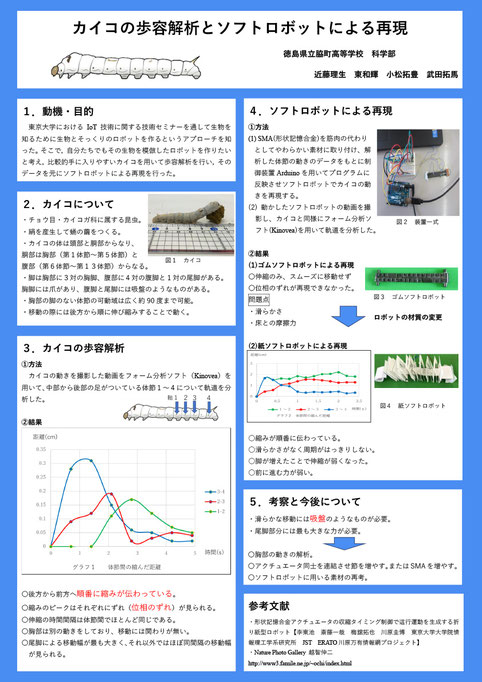
僕たちは、東京大学でのIoT研修を通して、生物を知るために、生物にそっくりなロボットを作るというアプローチがあることを知りました。特に「やわらかさ」が生物らしさと深く関係しているという点に興味を持ち、自分たちで生物を模倣したロボットを作りたいと考えました。
そこで、手に入りやすいカイコの動きを動画撮影し、動作分析ソフト「Kinovea」を用いて歩容解析を行いました。
その結果カイコは
(1)前方の体節から後方の体節へと動きが伝わっていること
(2)伸縮の間隔は体節間においてほぼ等しいこと
(3)その伸縮が体節間を伝わるには位相のずれが見られる
という結果が得られました。
また、その解析データをもとに、ゴムや紙などの柔らかい素材でできたアクチュエータを「Arduino」により制御することでカイコの動きの再現を行いました。まずは、ゴムを素材としたアクチュエータ(形状記憶合金を電気回路により制御)では、伸縮は再現できましたが、スムーズな移動や位相のずれは再現できませんでした。
一方で、紙を素材にしたものは、伸縮と位相のずれは再現できましたが、移動距離は小さくなりました。
このように、今回の研究を通して、生物の動きを「Kinovea」で動画解析できること、そして、これまでの金属のようなロボットでは再現できないような動きも、柔らかな素材を用いることで再現が可能であることがわかりました。
※クリックすると拡大します
■かかった時間はどのくらい?
先輩が研究したものを引き継ぎ、半年ほど研究を行いました。
■今回の研究で苦労したことは?
「Kinovea」「Arduino」などのソフトをマスターするのに時間がかかりました。また、「Arduino」で制御するのに用いる電流が小さいため、プログラムを組んでカイコの動きを再現する際に適正な値を探すのに苦労しました。
■「ココは工夫した!」「ココを見てほしい」という点は?
「Arduino」のプログラムにおいてSMA(形状記憶合金)に流す電流の大きさや稼働時間を制御することで、カイコの動きを再現しているところです。
■今回のポスター発表の感想をどうぞ!
初めての全国大会でのポスター発表ということもあり、たいへん緊張しました。ただ周りの人々が堂々と発表しているのを見て、開き直って練習通り発表できたと思います。また、今回の発表で様々なアドバイスをいただけたので、今後の研究に生かしていきたいです。貴重な経験ができて良かったです。